To meet the challenges of
adaptability, flexibility, and safety of the human-robot-environment interactions, we have developed a new generation of
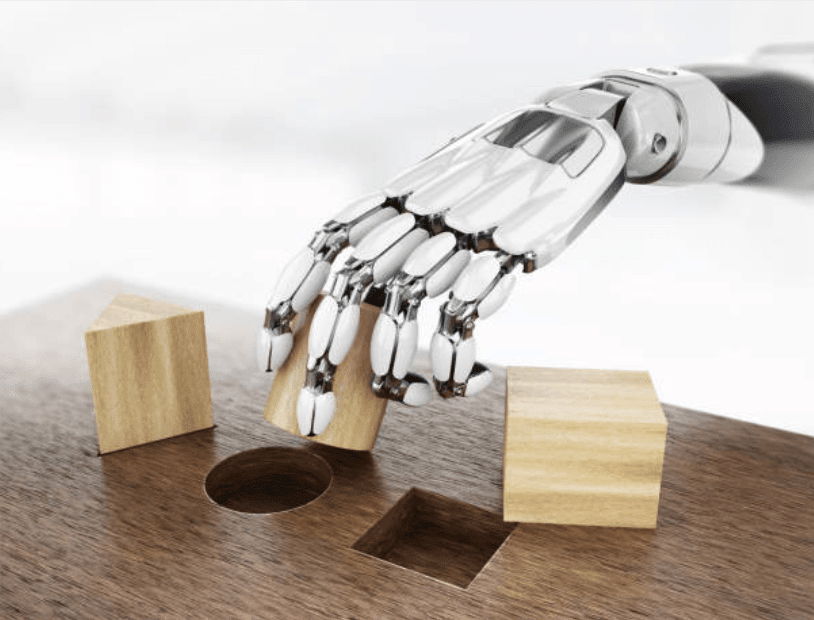
multi-finger gripping tools (robotic hands) adapted to collaborative robotics, teleoperation, flexible robotics and assistance robotics.
Our patented technology includes the following features:
- Safe human-robot-environment interactions resulting from the inherent attributes of the design.
- Adaptive gripping: our grasping hand can pick a wide range of objects (different shapes, materials, dimensions, etc.) thanks to poly-articulated fingers.
- Detection of contacts: it detects the moment of contact between the fingers and the elements of the environment (object to be grasped, obstacle, etc.).
- Monitoring of the interaction forces: our humanoid manipulator can evaluate and control the contact forces in the environment.
- Control of grasp power: the grasp strength is monitored and controlled.
- In-hand manipulation: articulating (rotational/linear motion) an object inside the hand, without moving the robotic arm.
- Compatible with extreme environments (marine, nuclear, etc.): we tailor the gripping hand for the specific constraints of your environment, protecting the operator from exposure to dangerous conditions.
We offer a
customized design/integration service (size, number of fingers, degree of operation, etc.) for our grip solution
tailored to your needs (set of tasks, operating environment, etc.).